
3D Vectors
All of the things we have learned so far can be applied to 3D vectors. Essentially, we add the third dimension so that 3D vectors are now capable of describing points in space rather than just planes. Click here to revise 2D vectors including unit vectors and how to find magnitude and direction. Also recall 2D vector arithmetic and vectors in context such as position vectors and vectors in trigonometry. At this level, we often extend a lot of the earlier mechanics problems to two dimensions – it is very simple to add the third dimension. See Calculus in Kinematics, for example.
Unit 3D Vectors
 Recall the unit vectors
Recall the unit vectors  and
and  when working in two dimensions. We now extend to three dimensions and we introduce the third unit vector:
when working in two dimensions. We now extend to three dimensions and we introduce the third unit vector:

These vectors point in the  ,
,  and
and  directions respectively. Notice the position of the and axes relative to the -axis. We call this the right-hand rule. This means that if the -axis is your index finger on your right hand and the -axis is your middle finger, then the -axis is your thumb and its points upwards. We often see it in different orientations (see Example 1) but usually with the -axis pointing upwards. If you find that with your thumb pointing upwards, the and axis are on the wrong fingers, you are likely using a left-handed coordinate frame.
directions respectively. Notice the position of the and axes relative to the -axis. We call this the right-hand rule. This means that if the -axis is your index finger on your right hand and the -axis is your middle finger, then the -axis is your thumb and its points upwards. We often see it in different orientations (see Example 1) but usually with the -axis pointing upwards. If you find that with your thumb pointing upwards, the and axis are on the wrong fingers, you are likely using a left-handed coordinate frame.
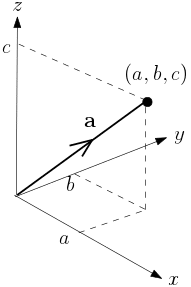 With these vectors, we can now identify the position vector that points from the origin to any point in 3D space. The vector
With these vectors, we can now identify the position vector that points from the origin to any point in 3D space. The vector  we can see here is a position vector as it points from the origin. We can write
we can see here is a position vector as it points from the origin. We can write
 .
.
It follows, by a simple application of 3D Pythagoras, that the magnitude of this vector is
 .
.
It follows that a unit vector in the direction of is given by  . See Example 1.
. See Example 1.
3D Vector Arithmetic and Magnitude
We can apply the operations that we saw on the vector arithmetic page in a similar fashion. That is, suppose we have the vectors  and
and  . It follows that
. It follows that

where  is a scalar constant
is a scalar constant
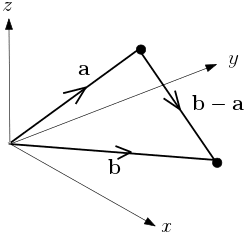 We can easily extend the geometric interpretations that we saw on the vector arithmetic page to 3 dimensions. For example, the vector between two points in 3D is given by
We can easily extend the geometric interpretations that we saw on the vector arithmetic page to 3 dimensions. For example, the vector between two points in 3D is given by  . It follows that the distance between these two points is the magnitude of this vector and given by
. It follows that the distance between these two points is the magnitude of this vector and given by  . Note that
. Note that  is not a position vector as it doesn’t point from the origin. It does however lie in the same plane as and
is not a position vector as it doesn’t point from the origin. It does however lie in the same plane as and  . We say that , and are coplanar. See Example 1.
. We say that , and are coplanar. See Example 1.
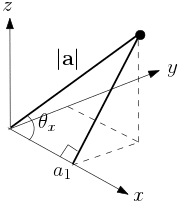 We can also extend the concept of direction to 3D vectors. A 3D vector now lies in space and not on a plane but a simple application of SOHCAHTOA (cos=adj/hyp) tells us that
We can also extend the concept of direction to 3D vectors. A 3D vector now lies in space and not on a plane but a simple application of SOHCAHTOA (cos=adj/hyp) tells us that  for the vector
for the vector  that makes an angle of
that makes an angle of  with the -axis. Similarly,
with the -axis. Similarly,  and
and  where makes an angle of
where makes an angle of  and
and  with the and axes respectively. See Example 2.
with the and axes respectively. See Example 2.
Examples
The points  and
and  have position vectors
have position vectors  and
and  respectively.
respectively.
- Find the exact distance between the points
 and
and  .
. - Show that the triangle
 is isosceles.
is isosceles. - The point is such that the position vector
 . Find a unit vector in the direction
. Find a unit vector in the direction  .
.
 is isosceles.
is isosceles. . Find a unit vector in the direction
. Find a unit vector in the direction  .
.Solution:
It is always a good idea to begin by sketching the information in the question.

- We first find the vector that points from to :
 . Hence the exact distance between and is given by
. Hence the exact distance between and is given by  .
. - The lengths of the other sides in the triangle are
 and
and  . Since
. Since  , two of the sides are the same length and the triangle is hence isosceles.
, two of the sides are the same length and the triangle is hence isosceles. - We find the vector:
 . It follows that
. It follows that  . This vector has length
. This vector has length  (see simplifying surds). Hence, a unit vector in this direction is
(see simplifying surds). Hence, a unit vector in this direction is  (see rationalising the denominator).
(see rationalising the denominator).
 . Hence the exact distance between
. Hence the exact distance between  .
. and
and  . Since
. Since  , two of the sides are the same length and the triangle is hence isosceles.
, two of the sides are the same length and the triangle is hence isosceles. . It follows that
. It follows that  . This vector has length
. This vector has length  (see
(see  (see
(see The diagram shows a cube with sides of length 1 and vertices at  , , ,
, , ,  ,
,  ,
,  ,
,  and
and  .
.
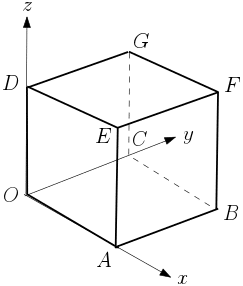
- Express the diagonal in vector notation.
- Find the cosine of the angle that the diagonal makes with the y-axis.
 in vector notation.
in vector notation.Solution:

- Suppose the angle between the diagonal and the y-axis (or ) is
 . Using SOHCAHTOA (cos=adj/hyp) it follows that
. Using SOHCAHTOA (cos=adj/hyp) it follows that  .
.

 ) is
) is  .
.